|
Search
|
|
only one
keyword search term per box
|
|
| |
|
Categories
|
|
|
|
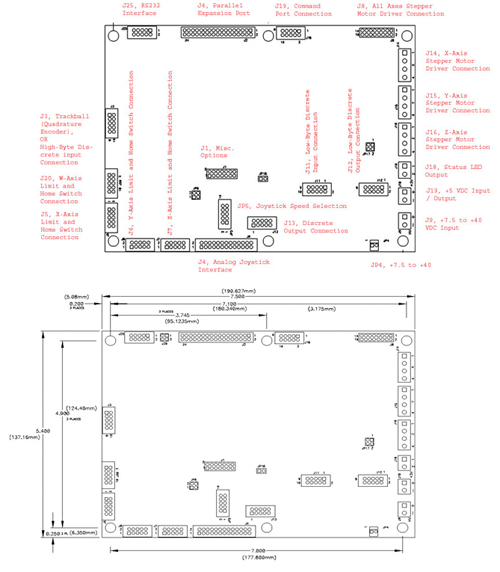
Stepper Motor Control Card
item #: MCSMPSMC-3
Availability: in stock - available for immediate shipment
Three-Axis Programmable / Teachable Stepper Motor Control Card
|
|
|
| Unit Price: |
|
|
|
| 1-4 pieces: |
$971.14 |
|
|
| 5-9 pieces: |
$922.57 |
|
|
| 10-24 pieces: |
$890.29 |
|
|
| 25-49 pieces: |
$856.41 |
|
|
| 50-99 pieces: |
$825.15 |
|
|
| Prices for larger quantities may be obtained by contacting us or by clicking the RFQ below. |
|
|
| OEM quantities, more than 100 units or special instructions: |
|
|
|
|
This product is currently not available in stock.
|

|









